Jezioro Kortowskie 1999 - Opracowanie danych
Opracowanie danych pomiarowych i wykonanie cyfrowej mapy głębokościowej
Po przeprowadzeniu terenowych pomiarów batymetrycznych na testowym obiekcie opracowano zebrane dane pomiarowe. Wyznaczona w czasie rzeczywistym przez satelitarny system pozycjonowania DGPS pozycja, wraz z pomiarami detekcji dna były zapisywane w kontrolerze echosondy w pliku tekstowym. Format pliku zawierający dane pomiarowe z obydwu systemów ma następującą postać:
GL,14155570,5345.841068,N,02026.553841,E
D1,14155510, 9.26,-16, 1, 0
Q1,14155510,Sv, 9.26
pelagic: 0.00, 25.00,250
bottom: 10.00, -5.00, 75
W1,14155510
D1,14155540, 9.16,-13, 1, 0
Q1,14155540,Sv, 9.16
pelagic: 0.00, 25.00,250
bottom: 10.00, -5.00, 75
W1,14155540
D1,14155570, 9.10,-16, 1, 0
Q1,14155570,Sv, 9.10
pelagic: 0.00, 25.00,250
bottom: 10.00, -5.00, 75
W1,14155570
D1,14155600, 9.04,-15, 1, 0
Q1,14155600,Sv, 9.04
pelagic: 0.00, 25.00,250
bottom: 10.00, -5.00, 75
W1,14155600
Dane zapisywane w pamięci kontrolera echosondy w trakcie sondażu.
Fragment powyższych danych tekstowych stanowi sekwencję cyklu jednosekundowego, zawierającego wyznaczoną pozycję w układzie WGS-84 oraz kilka pomiarów głębokości. Oprócz współrzędnych jednostki pływającej dane te zawierają podstawowe parametry systemu do pomiaru głębokości oraz wyniki sondażu dna. Podstawowe dane potrzebne do wykonania cyfrowej mapy głębokościowej są zaznaczone szarym tłem. Aby wyselekcjonować niezbędne do dalszego opracowania dane spośród kilkunastu, a nawet kilkudziesięciu tysięcy obserwacji opracowano program SONDA, korelujący w czasie dane z systemu pozycjonowania i systemu pomiaru głębokości, oraz ułatwiający w dużym stopniu proces opracowania obserwacji i przygotowujący dane wejściowe do programów, umożliwiających opracowanie cyfrowej mapy batymetrycznej. Po zastosowaniu programu SONDA otrzymano dane pomiarowe w następującej postaci:
23 14155570 5345.841068 2026.553841 9.10
24 14155670 5345.841320 2026.551499 8.86
25 14155770 5345.841700 2026.549194 8.66
26 14155870 5345.842129 2026.546918 8.38
27 14155970 5345.842700 2026.544677 8.08
28 14160070 5345.843284 2026.542407 7.84
29 14160170 5345.843846 2026.540102 7.42
30 14160270 5345.844374 2026.537770 7.18
31 14160370 5345.844868 2026.535425 6.82
32 14160470 5345.845278 2026.533037 6.44
33 14160570 5345.845524 2026.530588 6.22
34 14160670 5345.845717 2026.528130 6.00
35 14160770 5345.845982 2026.525696 5.66
36 14160870 5345.846345 2026.523287 5.40
37 14160970 5345.846804 2026.520906 5.20
Gotowe dane obserwacyjne do opracowania mapy głębokościowej.
Uporządkowane dane zawierają w wierszu kolejno numer obserwacji, czas (w godzinach, minutach, sekundach), pozycję (B – długość geodezyjna, L – szerokość geodezyjna) oraz głębokość (w metrach). Dane w takiej postaci można łatwo importować do programów typu CAD, w celu tworzenia modelu przestrzennego DTM (Digital Terrain Model), oraz kreślenia warstwic obrazujących pionowe ukształtowanie terenu. Do opracowania cyfrowej mapy warstwicowej pomierzonego jeziora wykorzystano pakiet programów firmy Autodesk Inc.. Do opracowania danych pomiarowych, zarządzania dużą ilością pikiet z pomiarów sondażowych oraz wykreślenia warstwy linii brzegowej użyto programu AutoCad Map 2000 [Autodesk Inc., 1999]. Poniżej przedstawiono fragment obserwacji z drugiego etapu pomiarów.
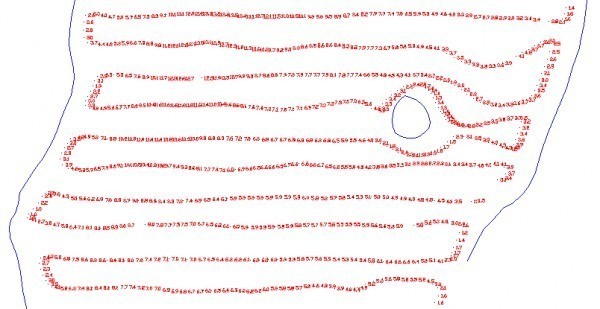
Fragment obserwacji z drugiego etapu pomiarów.
Na podstawie wczytanych pikiet opracowano przestrzenną siatkę trójkątów, charakteryzującą powierzchnię dna zbiornika wodnego. Do opracowania danych wykorzystano pakiet AutoCAD Land Development Desktop [Autodesk Inc., 1999].
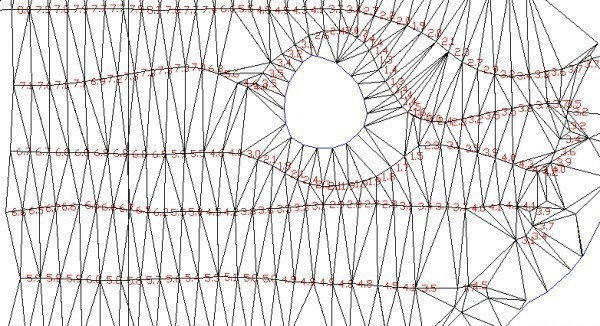
Siatka modelu części dna zbiornika wodnego.
Na podstawie siatki przestrzennej modelu dna pomierzonego jeziora utworzono izobaty
z cięciem 1 m.
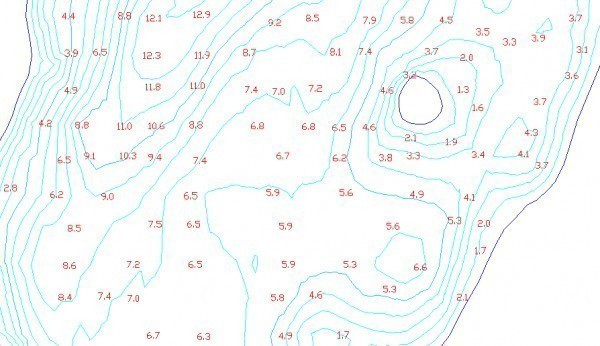
Fragment mapy warstwicowej pomierzonego jeziora Kortowskiego.
Dokładność wyznaczenia pozycji w trakcie pomiarów batymetrycznych
Różnice współrzędnych pomiędzy prawdziwym torem łodzi (OTF post-processing) a torem określonym w czasie rzeczywistym techniką DGPS (SA OFF) przedstawiono na poniższym rysunku.
